Instrumento automático de medición activa
Aplicación del producto
El control predictivo de sistemas flexibles, aplicable al control predictivo, consiste en combinar la medición y el procesamiento para formar un sistema de medición de bucle cerrado que controle el estado de procesamiento de la máquina herramienta y garantice la ausencia de desperdicios. El control flexible de una máquina herramienta se puede lograr con un controlador en un sistema de bucle cerrado mínimo capaz de procesar y posprocesar mediciones. El instrumento de medición, junto con la computadora y la comunicación con las máquinas superior e inferior, permite la gestión unificada de la línea automática. De esta manera, se puede construir una línea de producción automática de alta eficiencia sin desperdicios. Además, una variedad de sensores, correspondientes a diferentes objetos externos para su detección, garantizan que todo el sistema no se vea afectado por factores externos.
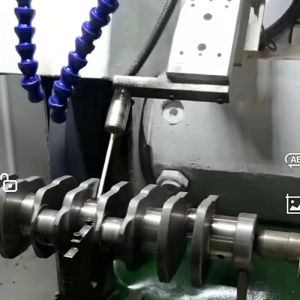
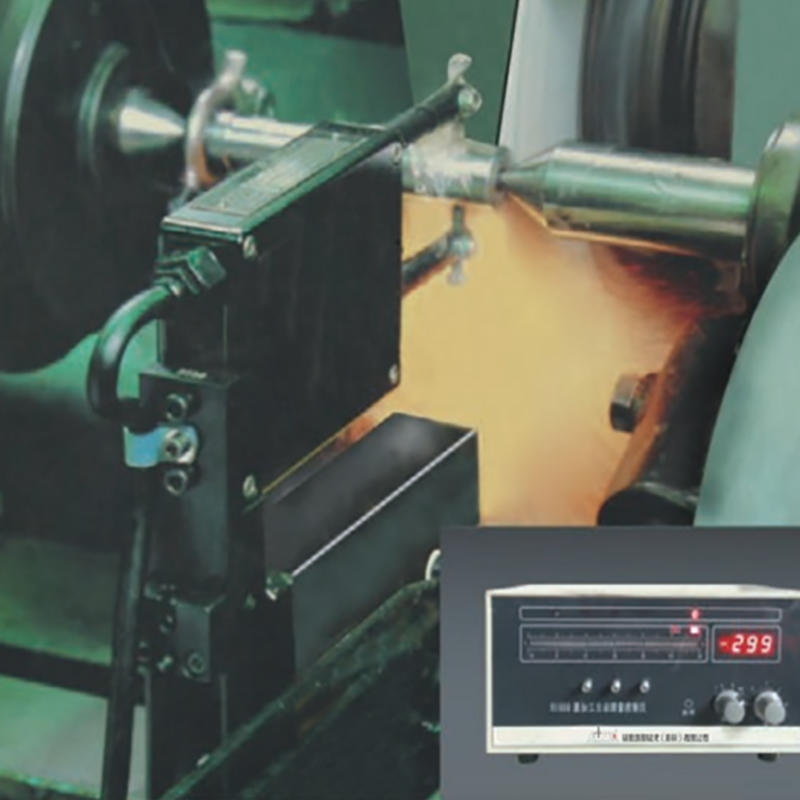
El proceso de búsqueda de medición activa. Durante el procesamiento, el dispositivo de medición mide la pieza de trabajo en cualquier momento e ingresa los resultados de la medición en el controlador. En el punto de señal preestablecido, el controlador envía una señal para controlar el funcionamiento de la máquina herramienta. Por ejemplo, en el proceso de rectificado, el avance de rectificado grueso, cuando el primer punto de señal de tamaño, el controlador señala, la máquina herramienta cambia de rectificado grueso a rectificado fino, cuando el segundo punto de señal de tamaño, la máquina herramienta cambia de avance de rectificado fino a rectificado ligero (sin rectificado de chispa), cuando el tercer punto de señal, la pieza de trabajo al tamaño preestablecido, la muela de rectificado regresa rápidamente y entra en estado de espera del siguiente ciclo.
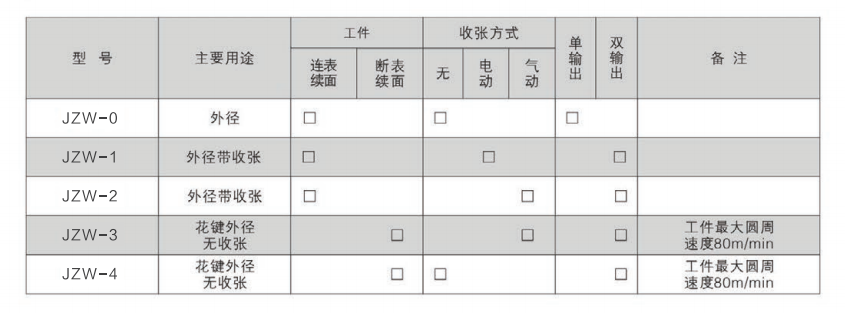
Parámetros del producto
Vídeo del producto

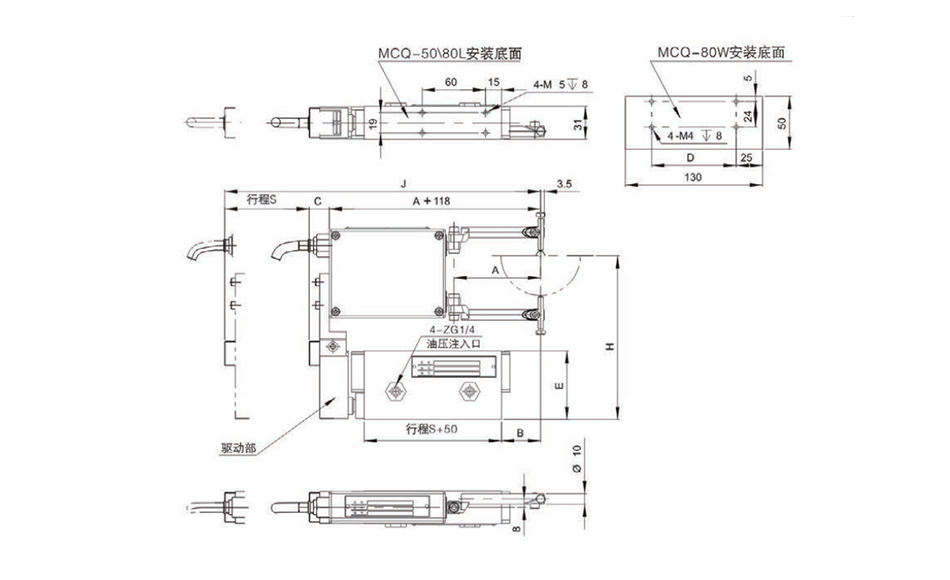
Tamaño del producto